
Show summary Hide summary
- How a walking robot is changing Mars fieldwork
- Inside the innovative life-hunting toolkit
- Why autonomous navigation accelerates life detection
- From Mars labs to future space technology ecosystems
- What this means for astronauts and human-robot teams
- How is this walking robot different from current Mars rovers?
- Can a small payload really support serious life detection science?
- What role does autonomous navigation play in Mars Exploration?
- Will these robots replace human explorers on Mars?
- When could such walking robots fly on real missions?
- FAQ
- How does a mars walking robot improve exploration compared to traditional rovers?
- What kind of scientific instruments can a mars walking robot carry?
- Can a mars walking robot operate independently or does it need constant human control?
- What challenges do mars walking robots face on the Martian surface?
- How could mars walking robots impact the search for life on Mars?
Imagine watching a Mars rover crawl a few dozen meters while a new Mars Walking Robot sprints across rocks, scans several sites, and flags the one most likely to hide traces of life. That shift is happening now.
Planetary missions have long advanced at a cautious, almost glacial rhythm. Communication delays of up to 22 minutes mean every move on Mars must be planned carefully. Rovers typically cover a few hundred meters a day. That pace constrains Mars Exploration, limits Planetary Science returns, and slows your hunt for convincing Life Detection evidence. To see how new robotic tech is evolving, read how martian dust storm chemistry drives innovation on the Red Planet.
How a walking robot is changing Mars fieldwork
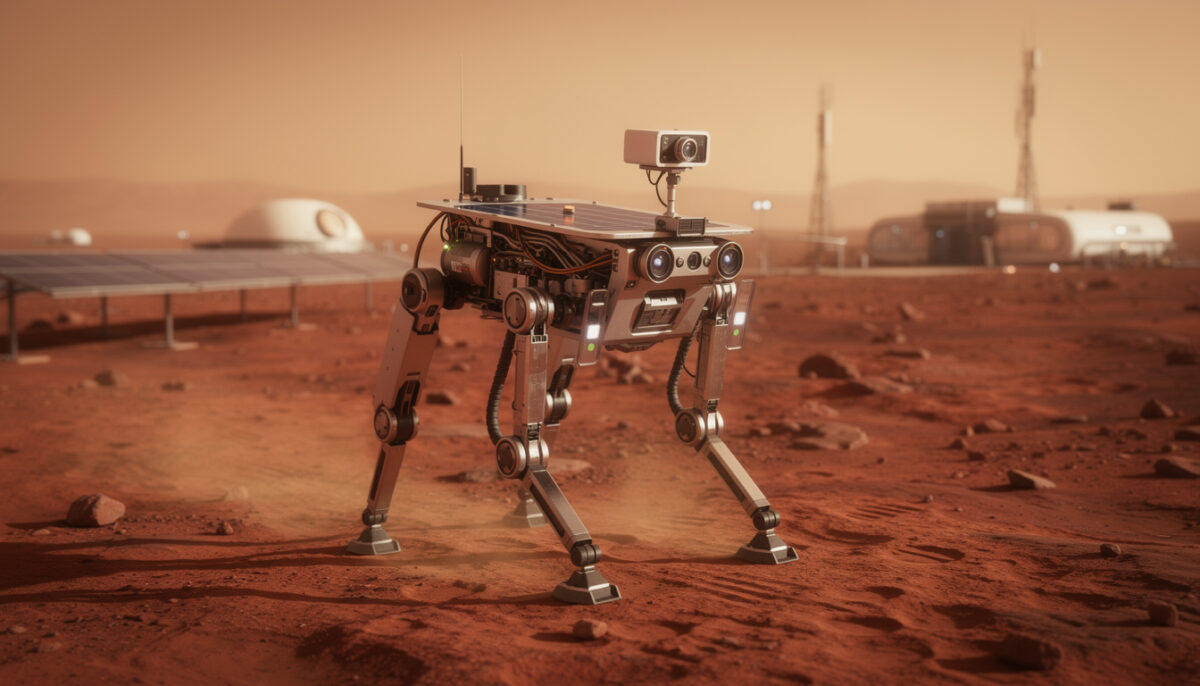
To break this slow-motion pattern, a European team built a semi-autonomous system around the four-legged robot ANYmal. Instead of waiting for detailed commands from Earth, this mars walking robot moves from rock to rock on its own and runs compact instruments without constant supervision. The goal is simple: more sites, more data, less time.
A Recent Impact on the Moon Leaves a Striking New Bright Scar
Did a Black Hole Just Erupt? This ‘Impossible’ Particle Could Be the Key Evidence

During tests, ANYmal walked through a Mars-like environment, chose targets identified ahead of time, and positioned a robotic arm with millimetric precision. The combination of Autonomous Navigation and embedded Robotics tools turned it into a fast field geologist, able to deliver useful results before operators even sent a new command.
From cautious rovers to agile Mars Exploration
The big leap does not come only from legs instead of wheels. It comes from the shift to semi-autonomy. Traditional rovers often analyze a single rock under tight human control. ANYmal, by contrast, chained several targets in one run, showing how Space Technology can compress hours of work into minutes. For related breakthroughs on other worlds, see how something massive lies beneath Jupiter’s clouds has pushed exploration advances.
Across multiple simulated Exploration Mission runs, multi-target traverses finished in 12 to 23 minutes, compared with 41 minutes for a comparable human-guided operation. That threefold gain echoes results highlighted in missions discussed on recent ESA case studies, where four-legged systems consistently outperform classical rover workflows.
Inside the innovative life-hunting toolkit
The team gave ANYmal a lean but smart payload. A compact microscopic imager, MICRO, captured detailed textures of rock surfaces. Alongside it, a portable Raman spectrometer—initially built for the ESA‑ESRIC Space Resources Challenge—identified minerals and potential organic compounds. Both instruments were mounted on a robotic arm capable of sub-centimeter positioning.
This configuration answered a pressing question for Extraterrestrial Research: can a relatively small suite of tools still deliver meaningful science at high speed? Results said yes. Even with this streamlined setup, the robot picked out rocks relevant for astrobiology and in‑situ resource utilization, confirming that lighter and quicker can still mean scientifically credible.
What the robot actually found on Mars analog terrain
Tests took place in the “Marslabor” at the University of Basel, a sandbox built to mimic Martian and lunar surfaces with analogue rocks, regolith, and controlled lighting. In this simulated field site, ANYmal identified a range of rock types valuable for Planetary Science: gypsum, carbonates, basalts, dunite, and anorthosite.
Dunite, rich in olivine and oxides, and anorthosite, packed with anorthite, are especially attractive for future resource missions. These materials hint at oxygen extraction, metal production, or even construction feedstock for habitats, echoing scenarios discussed in reports on walking robots and Moon mining. In one key test, ANYmal correctly identified every selected target, showing that speed did not degrade scientific accuracy.
Why autonomous navigation accelerates life detection
Think about how field geologists work on Earth. They scan a landscape, quickly sample several promising spots, then zoom in where the rocks look most interesting. Semi-autonomous Autonomous Navigation finally lets robots do something similar on Mars. ANYmal moved between pre‑chosen points, triggered its arm, captured images and spectra, then hopped to the next objective. For discoveries involving early stars, learn how a ancient star milky way was tracked with new robotic techniques.
This rhythm changes mission strategy. Instead of betting precious time on one rock, the mission can spread its efforts over multiple candidates. Scientists on Earth later sift through the incoming data, using mineral signatures, textures, and context to select the most promising locations for deeper Life Detection studies or even sample caching.
Concrete advantages during an Exploration Mission
For mission planners, the benefits show up across several key metrics:
- Coverage: larger surface area scanned per day, opening more geological diversity.
- Efficiency: several targets studied in a single communication window.
- Risk management: less exposure time at any one hazardous obstacle.
- Science return: better statistics for detecting rare biosignatures.
The same logic already inspires other concepts, from quadruped field partners described in projects such as next-generation Mars quadrupeds to hexapod systems exploring advanced gait control in the harsh Martian environment.
From Mars labs to future space technology ecosystems
The ANYmal trials also say something larger about the future of Space Technology. Instead of a single “hero rover” carrying every instrument, agencies can field swarms of agile walkers with specialized roles. One robot maps terrain, another searches for ice, a third focuses on organic chemistry. Data then flows into shared models, much like sensor networks in tomorrow’s smart cities.
Urban research already explores similar ideas, with dense autonomous systems reshaping daily life, as seen in studies about AI and future cities. On Mars, the same philosophy points toward robotic “villages” where walking explorers, fixed stations, and orbiters co‑operate as one distributed observatory.
What this means for astronauts and human-robot teams
When crews eventually land on Mars, they will rely on autonomous walkers as field partners rather than simple tools. A robot like ANYmal can scout ahead, test unstable slopes, and pre‑screen samples before astronauts spend time and energy on detailed studies.
Other projects, from Olympus-style four-legged machines to lizard-inspired climbers, show how fast this ecosystem is evolving. Combined with advances in neural interfaces such as those studied in brain‑wave driven control research, tomorrow’s explorers may command robotic teammates in ways that feel almost instinctive, blending human intuition with machine endurance.
How is this walking robot different from current Mars rovers?
Traditional Mars rovers use wheels, move cautiously, and require continuous human supervision for most actions. The new Mars Walking Robot uses legs for better traction on rocks and semi-autonomous navigation to move between multiple targets in a single run. It can position a robotic arm precisely, operate compact instruments, and complete comparable science tasks up to three times faster than a fully supervised rover activity.
Can a small payload really support serious life detection science?
Yes. Tests with a microscopic imager and a portable Raman spectrometer showed that even a compact payload can identify key minerals such as gypsum, carbonates, basalts, dunite, and anorthosite. These minerals are directly relevant to astrobiology and resource prospecting. The experiments demonstrated that streamlined instruments, combined with efficient robotics, can still deliver robust Planetary Science results.
What role does autonomous navigation play in Mars Exploration?
Autonomous navigation lets the robot plan short paths, avoid obstacles, and sequence several measurement sites without waiting for new commands from Earth. This reduces downtime caused by communication delays and allows each communication window to include multiple rock analyses. The outcome is broader coverage, more diverse samples, and faster progress toward identifying promising life detection targets.
Will these robots replace human explorers on Mars?
They are designed more as partners than replacements. Walking robots can work in dangerous or hard-to-reach areas, pre-screen samples, and operate continuously in harsh conditions. Humans still bring creativity, intuition, and flexible decision-making. The most effective exploration mission scenarios combine astronauts with autonomous walking robots working side by side.
When could such walking robots fly on real missions?
Legged systems are already being tested in Mars-analog environments on Earth, and research projects on quadrupeds and hexapods for planetary robotics are multiplying. Exact launch dates depend on agency priorities and mission schedules, but the current pace of development suggests that semi-autonomous walking robots could become part of surface exploration architectures within the next generation of missions.
FAQ
How does a mars walking robot improve exploration compared to traditional rovers?
A mars walking robot can navigate rougher terrain and visit more sites in less time, thanks to its agile mobility. This means scientists can gather a wider range of samples and data, speeding up the search for life on Mars.
What kind of scientific instruments can a mars walking robot carry?
These robots are designed to carry compact, advanced instruments such as spectrometers, cameras, and drilling tools. With these, a mars walking robot can analyse rocks and soil directly in the field.
Can a mars walking robot operate independently or does it need constant human control?
The latest mars walking robots are semi-autonomous, allowing them to make quick navigation and scientific decisions on their own. This reduces the need for constant commands from Earth, overcoming communication delays.
What challenges do mars walking robots face on the Martian surface?
Electrifying Dust Storms on Mars Transform the Red Planet’s Chemistry
Astronomers Unveil How Dying Stars Consume Their Giant Planetary Companions
Martian terrain is unpredictable, with rocks, dust, and steep slopes, posing risks for any machine. Mars walking robots must be robust and adaptable to handle harsh conditions and avoid getting stuck.
How could mars walking robots impact the search for life on Mars?
By reaching more diverse and difficult-to-access locations, mars walking robots increase the chances of finding sites with evidence of past or present life. Their speed and versatility make scientific missions more efficient and revealing.
